Categories: Blog, Dev – Posted on February 9th, 2026February 9th, 2026 Alley Kitty – my JS13k Games 2025 entry The theme for 2025 was Black cat, I immediately though of the 40 year old game, Alley Cat (online version, … Continue reading >Alley Kitty – my JS13k Games 2025 entry
Categories: Blog, Dev, Video – Posted on December 10th, 2024December 11th, 2024 Using ffmpeg to color correct / color grade a video When searching for ffmpeg color correction I always ran into examples with saturation, brightness, contrast and gamma command line options … Continue reading >Using ffmpeg to color correct / color grade a video
Categories: Blog, Dev – Posted on October 15th, 2024October 20th, 2024 WU3 Segments – a free font based on Vienna subway displays When I first was on the U3 subway in Vienna last year I noticed how many segments the characters have … Continue reading >WU3 Segments – a free font based on Vienna subway displays
Categories: Blog, Dev, Python – Posted on January 4th, 2021October 16th, 2024 Easy face recognition in Python Although I don’t like and I am against facial recognition in it’s popular context – public space surveillance, use on … Continue reading >Easy face recognition in Python
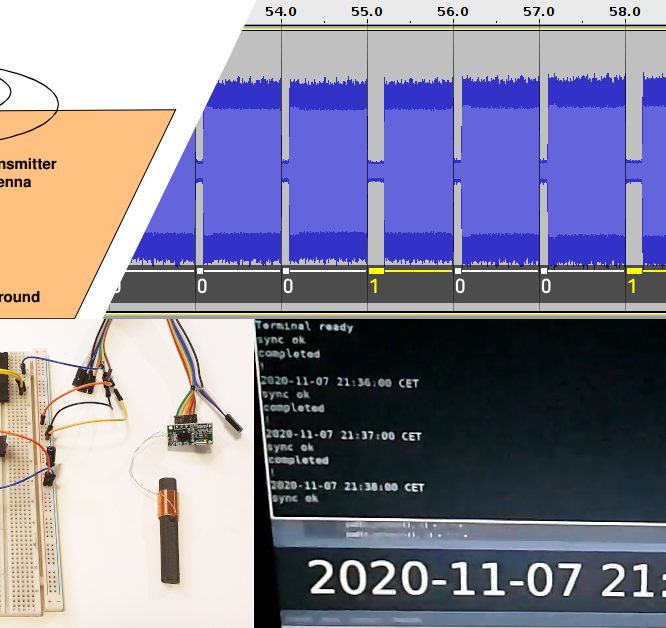
Categories: Dev, Wireless – Posted on December 12th, 2020December 12th, 2020 Receiving and decoding the DCF77 time signal with an ATMega/ATTiny AVR DCF77 is a German longwave time signal and standard-frequency radio station – according to Wikipedia. It is used by most … Continue reading >Receiving and decoding the DCF77 time signal with an ATMega/ATTiny AVR