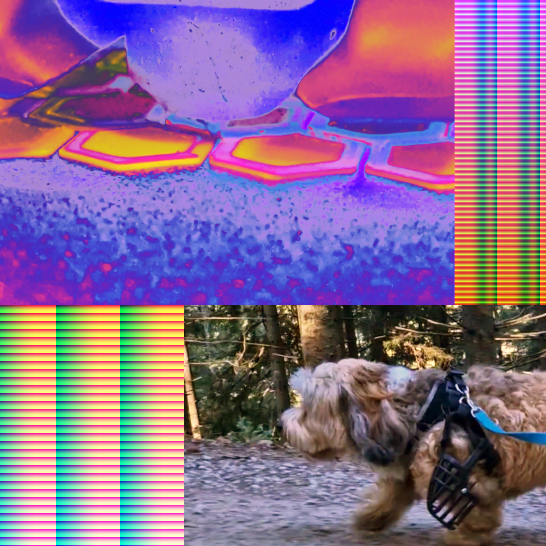
Categories: Blog, Dev, Video – Posted on December 10th, 2024December 11th, 2024 Using ffmpeg to color correct / color grade a video When searching for ffmpeg color correction I always ran into examples with saturation, brightness, contrast and gamma command line options … Continue reading >Using ffmpeg to color correct / color grade a video
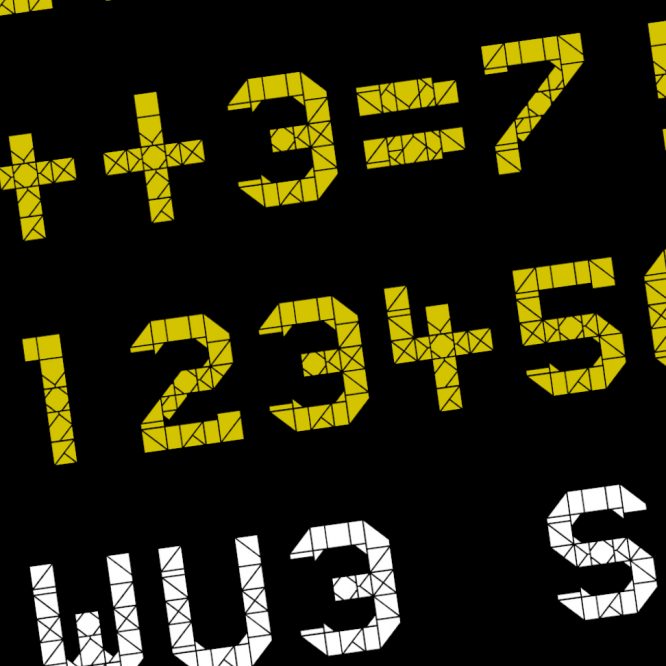
Categories: Blog, Dev – Posted on October 15th, 2024October 20th, 2024 WU3 Segments – a free font based on Vienna subway displays When I first was on the U3 subway in Vienna last year I noticed how many segments the characters have … Continue reading >WU3 Segments – a free font based on Vienna subway displays
Categories: Blog, Dev, Python – Posted on January 4th, 2021October 16th, 2024 Easy face recognition in Python Although I don’t like and I am against facial recognition in it’s popular context – public space surveillance, use on … Continue reading >Easy face recognition in Python
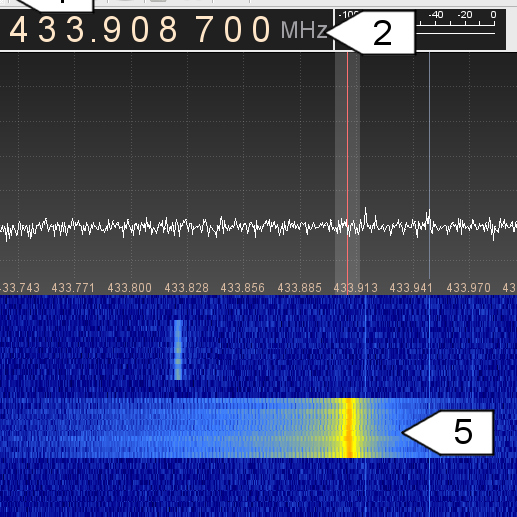
Categories: Blog, Dev, Wireless – Posted on March 16th, 2020December 15th, 2024 Receiving and decoding 433 MHz radio signals from wireless devices Wireless devices like temperature and humidity sensors, light switches, garage remotes, power sockets are usually sending and receiving their data … Continue reading >Receiving and decoding 433 MHz radio signals from wireless devices
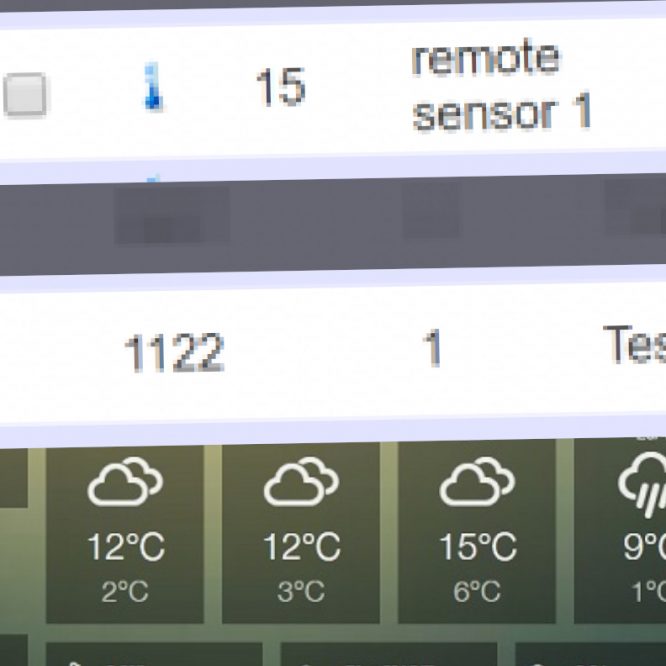
Categories: Blog, Dev, Wireless – Posted on January 16th, 2020October 16th, 2024 Domoticz HTTP/HTTPS poller and JSON Adding a sensor of a remote host to Domoticz is easy, just not very well documented. I have a DS1820 … Continue reading >Domoticz HTTP/HTTPS poller and JSON